
 Toyota Camry et,
Toyota Camry et,
Toyota Partner.
Toyota Camry et,
DESCRIPTION DU SYSTEME
GENERALITES
(a) Ce système détecte les obstacles situés aux angles et à l'arrière du véhicule à l'aide de capteurs à ultrasons. Le système informe ensuite le conducteur de la distance entre les capteurs et un obstacle, ainsi que leur position en les indiquant sur l'écran multifonction (sur l'ensemble de combiné d'instruments) et l'affichage multifonction (sur l'ensemble d'autoradio et d'affichage) et en faisant retentir un avertisseur sonore.
FONCTION DES PIECES CONSTITUTIVES
|
Pièce constitutive | Fonction |
|---|---|
|
Capteur à ultrasons | Détecte la distance entre le véhicule et un obstacle |
|
Signal sonore d'avertissement de distance n° 1 |
Retentit pour informer le conducteur de la distance jusqu'à l'obstacle |
|
Ecran multifonction (sur l'ensemble de combiné d'instruments) |
|
| Témoin de sonar de détection de distance (sur l'ensemble de combiné d'instruments) |
S'allume pour informer le conducteur que l'alimentation du système d'aide au stationnement intuitif est activée (le contacteur du moteur est en position ON (IG) et le système d'aide au stationnement intuitif est activé) |
|
Ensemble de combiné d'instruments | Transmet le signal d'activation/désactivation à l'ensemble d'ECU d'avertissement de distance |
|
Ensemble de contacteur au volant | Active, désactive ou arrête le fonctionnement du système d'aide au stationnement intuitif en transmettant le signal de fonctionnement du contacteur à l'ensemble de combiné d'instruments |
|
Ensemble de l'ECU d'avertissement de distance |
|
| ECU de carrosserie principale (ECU de carrosserie de réseau multiplex) |
Transmet les informations relatives à la destination à l'ensemble d'ECU d'avertissement de distance |
|
ECM | Transmet le signal de rapport engagé à l'ensemble d'ECU d'avertissement de distance |
|
Ensemble de récepteur de radio et d'affichage - Affichage multifonction |
|
| Reçoit les informations du capteur à ultrasons via la communication CAN et les transmet à l'affichage multifonction via le câble de signal vidéo. |
|
Affichage tête haute (sous-ensemble de rétroviseur du combiné d'instruments)*3 |
Reçoit les informations du capteur à ultrasons via la communication CAN et les transmet à l'affichage tête haute |
EXPLICATION DU FONCTIONNEMENT
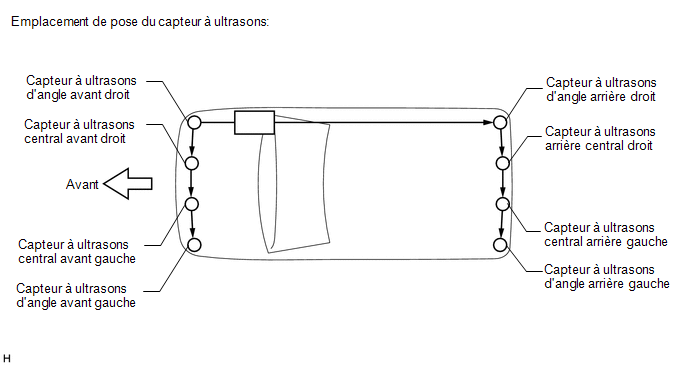
(a) Les conditions de fonctionnement de chaque capteur à ultrasons diffèrent en fonction de sa position de pose comme indiqué dans le tableau ci-dessous.
|
Position de pose | Conditions de fonctionnement |
|---|---|
|
Angle avant |
|
| Centre avant |
|
| Coin arrière |
|
| Centre arrière |
Lorsque le système fonctionne, l'ensemble d'ECU d'avertissement de distance envoie des ondes ultrasoniques à partir des capteurs à ultrasons. Lorsque ces ondes rencontrent un obstacle se situant dans la zone de couverture d'un ou plusieurs capteurs, elles sont renvoyées aux capteurs qui les transmettent à l'ensemble d'ECU d'avertissement de distance.
Sur la base de ces informations, l'ensemble d'ECU d'avertissement de distance transmet des signaux à l'ensemble d'autoradio et d'affichage, l'ensemble de combiné d'instruments et l'avertisseur sonore de distance n° 1. La distance approximative entre l'obstacle et le véhicule est ensuite indiquée et le signal sonore retentit.
CONSEIL:
Se reporter à la section Mesure de la zone de détection et vérification de l'affichage.
Cliquer ici .gif)
SIGNAUX DE COMMUNICATION DES PIECES CONSTITUTIVES
CONSEIL:
(a) Mode d'initialisation:
Un ID est attribué à chaque capteur et le diagnostic du capteur est effectué.
(1) Lorsque la vérification initiale fonctionne (le contacteur du moteur est en position ON (IG) et le système d'aide au stationnement intuitif est activé), l'ensemble d'ECU d'avertissement de distance fournit l'alimentation électrique aux premiers capteurs de chaque série (capteur à ultrasons d'angle avant droit et capteur à ultrasons d'angle arrière droit).
(2) Une fois l'alimentation électrique fournie, le capteur à ultrasons d'angle avant droit et le capteur à ultrasons d'angle arrière droit passent en mode veille pour recevoir un ID en provenance de l'ECU. Lorsque une certaine période de temps s'est écoulée, l'ECU envoie un signal d'attribution d'ID à ces capteurs.
(3) Le capteur à ultrasons d'angle avant droit et le capteur à ultrasons d'angle arrière droit reçoivent le signal d'attribution d'ID de l'ECU et effectuent un autodiagnostic. Lorsque l'autodiagnostic du capteur est terminé, l'ECU envoie un signal de confirmation d'attribution d'ID aux capteurs.
(4) Une fois la confirmation d'attribution d'ID effectuée, l'ECU fournit l'alimentation électrique aux deuxièmes capteurs de chaque série (capteur à ultrasons central avant droit et capteur à ultrasons central arrière droit) via les premiers capteurs. De la même manière que les premiers capteurs, les deuxièmes capteurs passent en mode veille. Lorsque une certaine période de temps s'est écoulée, l'ECU envoie un signal d'attribution d'ID aux deuxièmes capteurs.
(5) L'opération ci-dessus sera répétée jusqu'à ce qu'un ID ait été attribué au dernier capteur (capteur à ultrasons d'angle avant gauche ou capteur à ultrasons d'angle arrière gauche). L'initialisation prend fin lorsque l'attribution d'un ID à tous les capteurs à ultrasons est terminée.
(b) Mode de détection:
Une fois le mode d'initialisation terminé, le système passe en mode de détection. En mode de détection, l'ensemble d'ECU d'avertissement de distance envoie des signaux de demande d'information et des signaux d'activation de capteur aux capteurs à ultrasons et reçoit des signaux de résultat de détection des capteurs.
(1) L'ECU envoie régulièrement des signaux ID, des signaux de demande d'information et des signaux d'activation de capteur à chaque capteur à ultrasons en fonction du programme de communication.
(2) Lorsqu'une certaine période de temps s'est écoulée (l'opération de détection du capteur est terminée), l'ECU envoie un signal ID au capteur pour recevoir un signal de résultat de détection.
(3) Le capteur à ultrasons transmet un signal de résultat de détection ou un signal d'information de détection à l'ECU.
(4) L'opération ci-dessus est répétée pour chaque capteur à ultrasons.
 Schema Du Systeme
Schema Du Systeme Comment Utiliser La Recherche De Pannes
Comment Utiliser La Recherche De PannesPieces Constitutives
PIECES CONSTITUTIVES SCHEMA
*1 SABOT DE PROTECTION DU MOTEUR ARRIERE GAUCHE
*2 JOINT DE JOUE D'AILE AVANT GAUCHE
*3 SABOT DE PROTECTION DU MOTEUR N° 1
*4 REMBOURRAGE GAUCHE D'EXTENSION DE PASSAGE DE ROUE AVANT
*5 REMBOURRAGE DROIT D'EXTENSION D ...
Informations sur le véhicule non conformes (C168D)
DESCRIPTION
Ce DTC est enregistré lorsque le dispositif de commande de caméra de télévision estime, suite à son autodiagnostic, que les informations du véhicule reçues via la communication CAN et les informations du véhicule stockées dans le dispositif de commande de caméra de télév ...
Data List / Active Test
DATA LIST / ACTIVE TEST RELEVER LA DATA LIST CONSEIL:
La Data List du Techstream permet de relever les valeurs ou l'état des contacteurs, des capteurs, des actionneurs et d'autres éléments sans avoir à déposer de pièces. Cette vérification non intrusive peut être très utile dans la mesure ...